後方交会
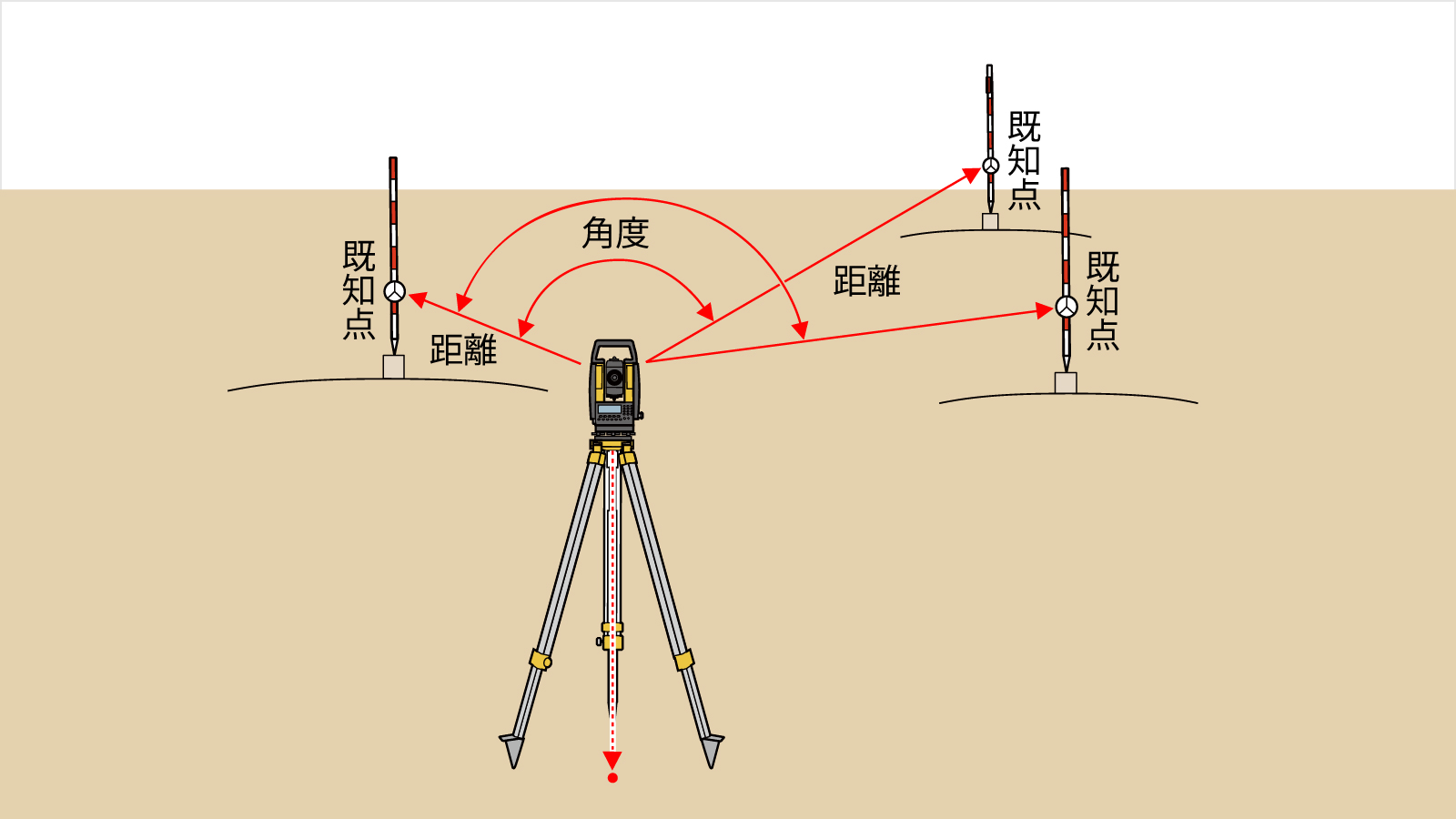
●器械を任意の位置に設置する場合、本製品は2~10個の既知点を測定することにより、器械点座標を計算します。
●測定する既知点が3点以上の場合、器械本体のX・Y座標は、最小二乗法を使用して計算されます。
●測点が多ければ、測定精度が向上します。
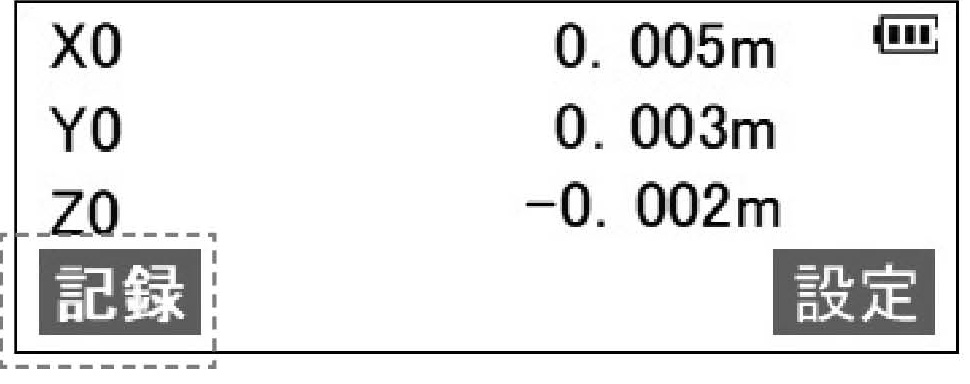
●既知点の夾角が15°以下の場合、計算エラーとなります。
7.1.1 既知点2点を測定して器械点座標を設定する
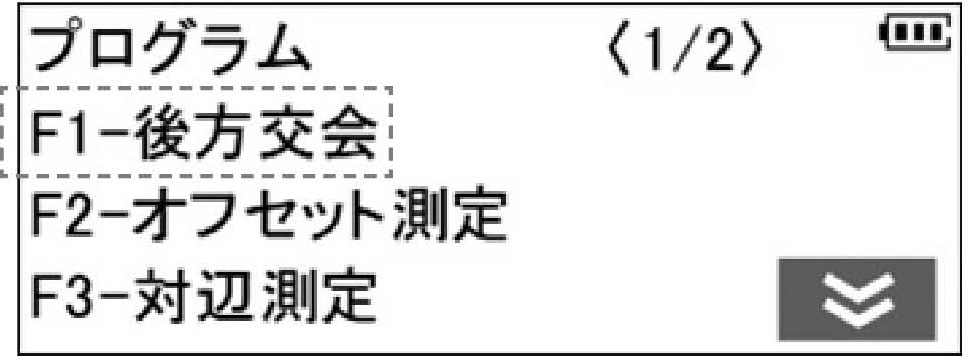
①「プログラム<1/2>」画面で、F1キー「後方交会」を押します。器械高入力画面が表示されます。
②テンキーを使用して「器械高(m)」を入力し、F5キー を押します。
を押します。
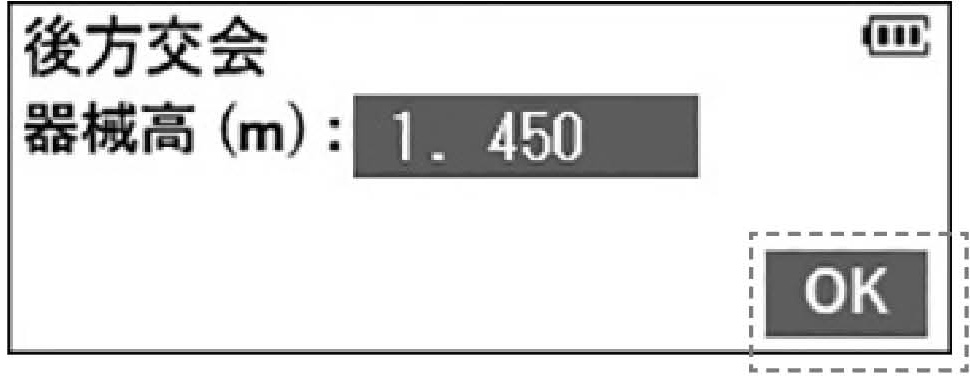
器械高に表示されている設定済の器械高を使用する場合は、そのままF5キーを押します。
③「既知点1を入力」と表示され、座標入力画面に移行します。
④既知点座標の 1点目の入力をします。
入力の方法は
(a.)「直接座標を入力する方法」と、
(b.)「登録されているデータを呼び出す方法」があります。
(a.)座標を直接入力する
① キーを使用してX、Y、Z座標を直接入力します。
キーを使用してX、Y、Z座標を直接入力します。
②座標を入力後にF5キーを押します。
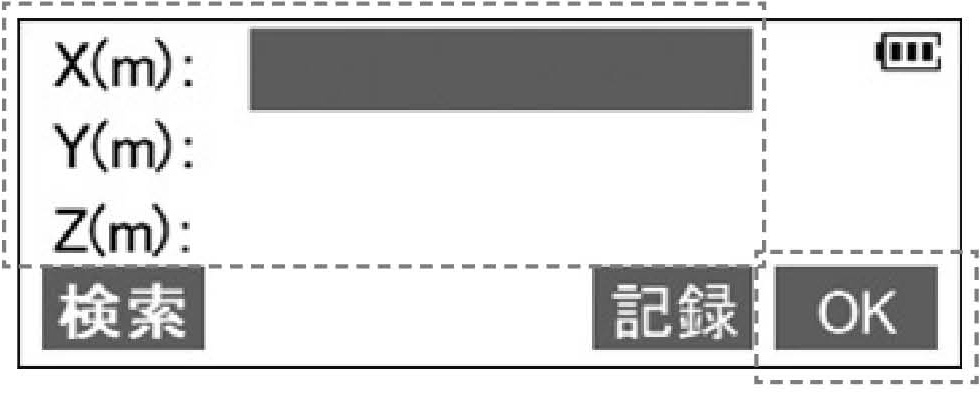
(b.)既知点の座標を呼び出して入力する
①F1キー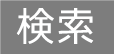 を押して既に登録されている測点を呼出します。
を押して既に登録されている測点を呼出します。
- 詳細は 「6.3.2 器械のメモリに登録されている座標データを読み込む場合」をお読みください。
②表示させた座標が正しいことを確認し、F5キーを押します。
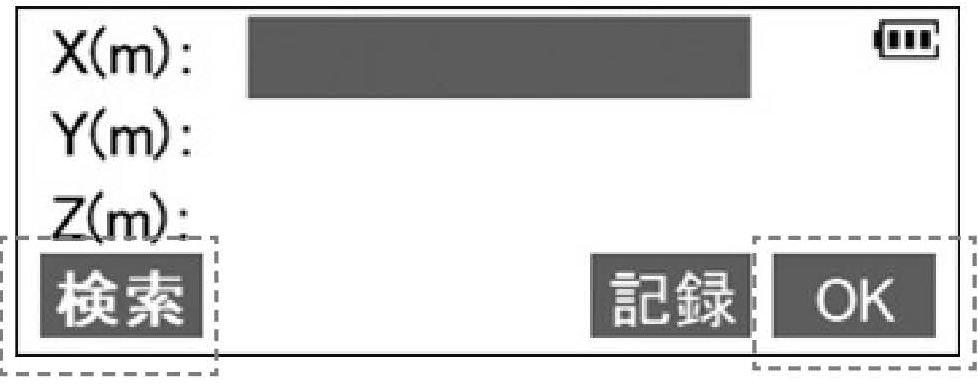
⑤「視準高(m)」を入力してF5キーを押します。
- 2次元座標測定の場合、視準高の入力は省略できます。
「既知点1を測定」と表示されます。
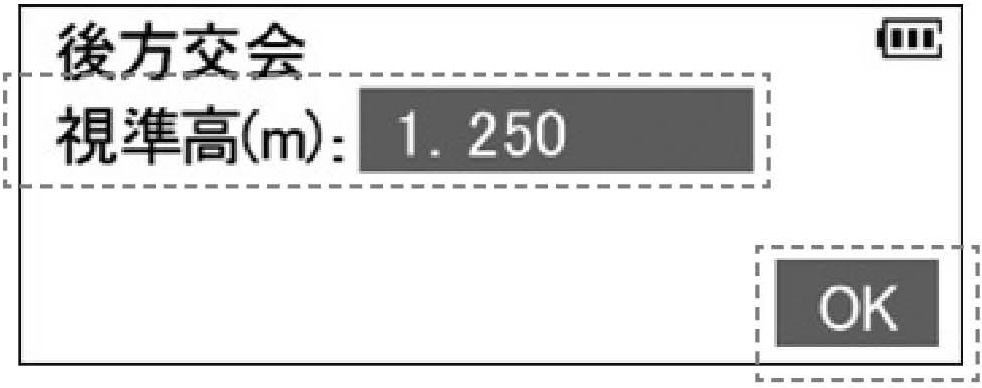
⑥ターゲットを視準し、「既知点1」をF5キー を押して測定します。
を押して測定します。
⑦既知点1の測定が完了すると結果が表示されます。
「斜距離」、「鉛直角」、「水平角」の各データが正しければF5キーを押します。
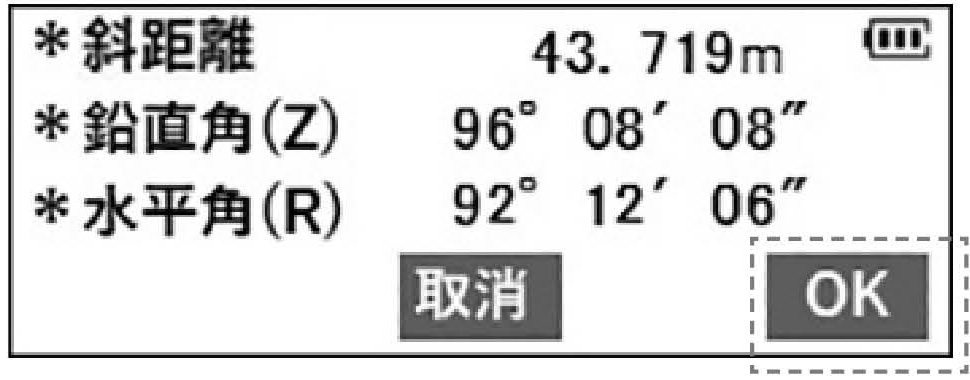
- データが間違っていた場合、F3キー
 を押すと座標入力画面に戻ります。
を押すと座標入力画面に戻ります。
⑥の方法で「既知点1」を再測定し、F5キーを押すと、「既知点 1」の測定を終了します。
⑧「既知点2を入力」と表示され、座標入力画面に移行します。
④~⑦の手順で既知点2を登録、測定します。データに間違いがなければF5キーを押します。
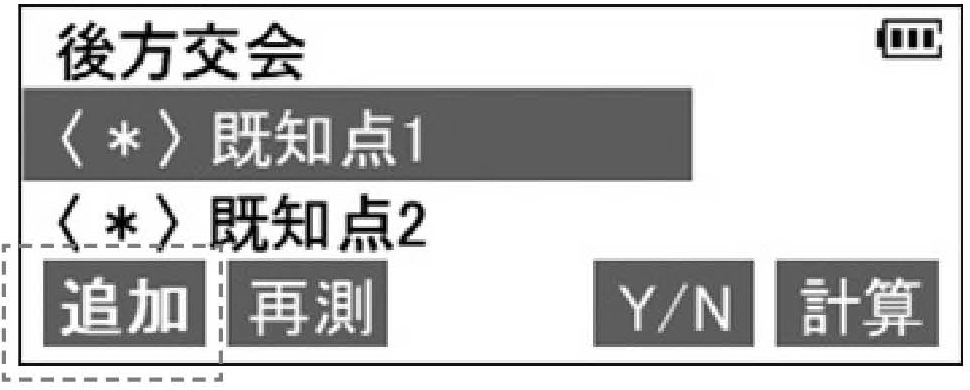
測定した既知点が表示されます。
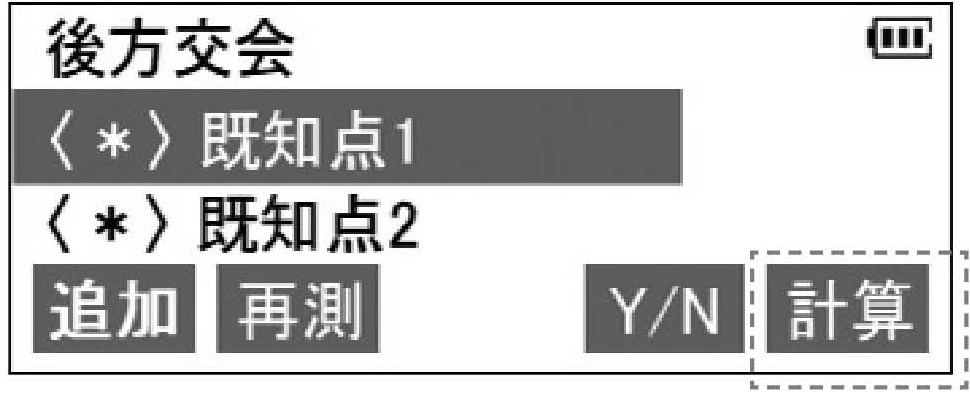
- キー :カーソルを上下に移動し、既知点を選択します。
- F1キー
 :既知点を追加します。
:既知点を追加します。 - F2キー
 :既知点の再入力または再測定します。
:既知点の再入力または再測定します。 - F4キー
 :計算に使用する既知点を選択します。
:計算に使用する既知点を選択します。 - F5キー
 :器械点の計算を開始します。
:器械点の計算を開始します。
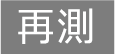
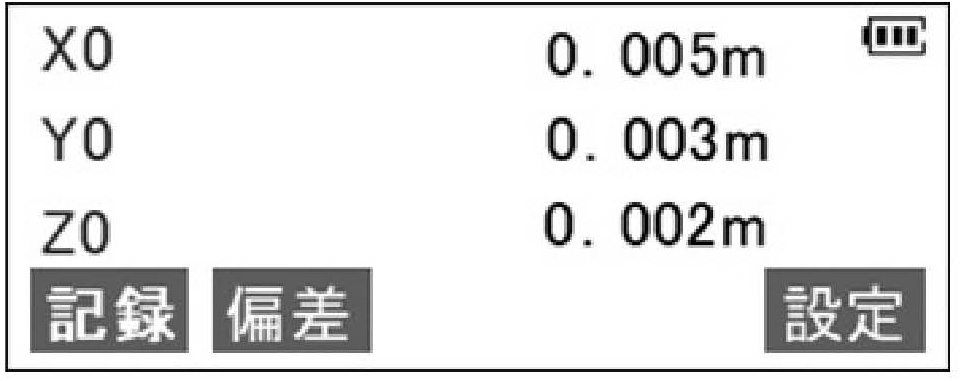
⑨F5キーを押すと、器械本体の座標(器械点)が計算されて表示されます。
- F1キー
 を押すと新しい器械点として記録できます。
を押すと新しい器械点として記録できます。
2点の座標で計算した結果と測定値の差が制限を超えると「計算エラー」と表示されます。 制限値は水平方向(X、Y)の距離差がおおよそ0.020m以内です。
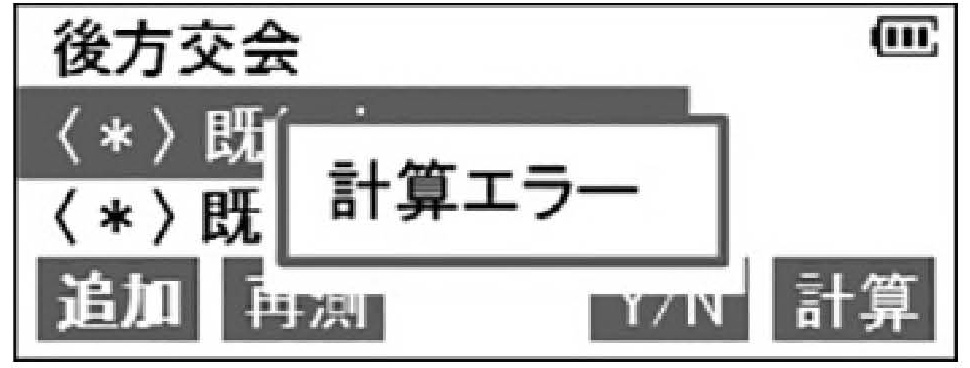
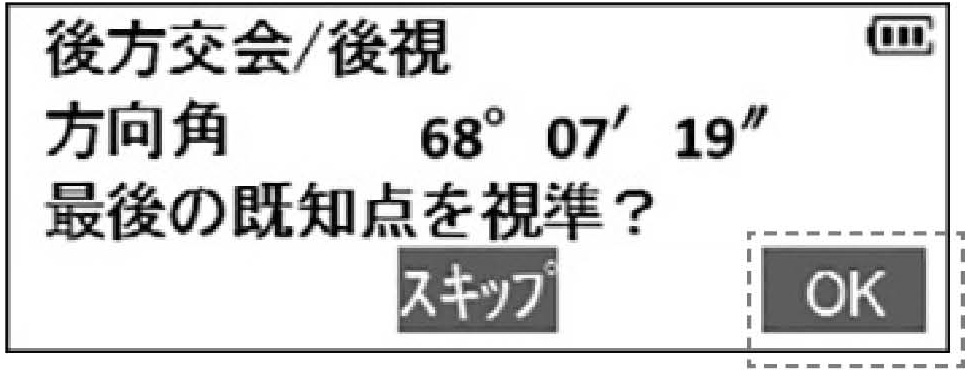
⑩F5キーを押すと器械点の座標を更新し、最後に測定した既知点の方向角を計算して表示します。
最後の既知点を視準し、F5キーを押して方向角を設定します。これで本製品のセットアップを終了します。
- F3キー
 を押すと、計算された方向角は設定されません。
を押すと、計算された方向角は設定されません。
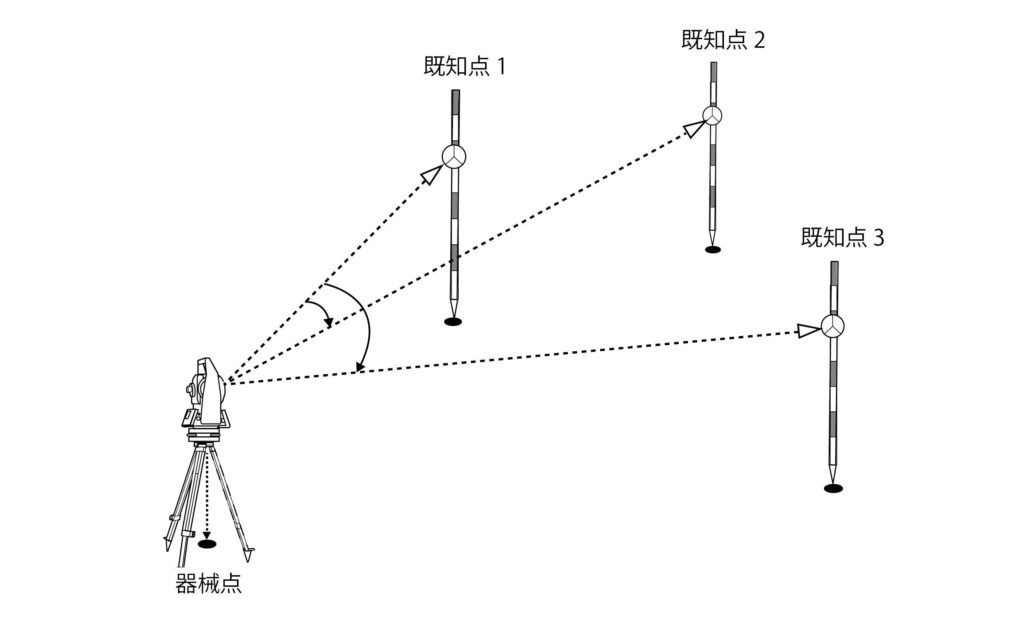
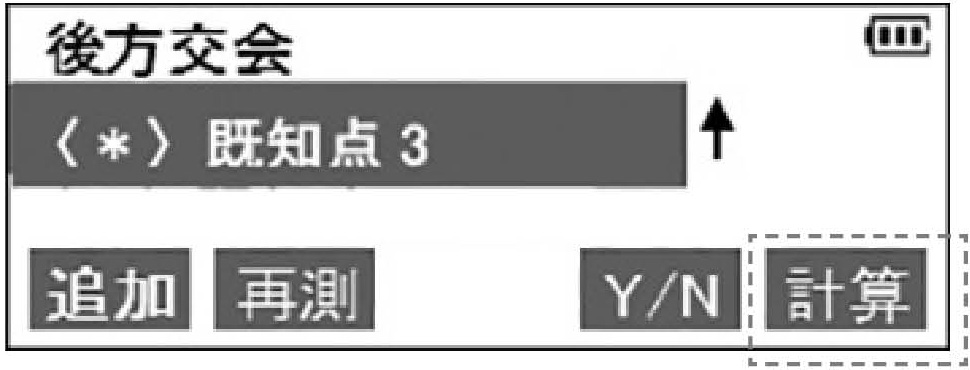
7.1.2 3点以上の既知点を測定して器械点座標を計算する
●「7.1.1既知点2点を測定して器械点座標を設定する」に従い、2つの既知の点を入力して測定すると既知点のリストが表示されます。
① F1キーを押して前述と同様に入力して測定します。
- 既知点は10点まで追加できます。
②必要な既知点がすべて入力され測定が完了するまで繰り返します。

③F5キーを押して器械点座標を計算します。
④F1キーを押すと新しい器械点として記録できます。
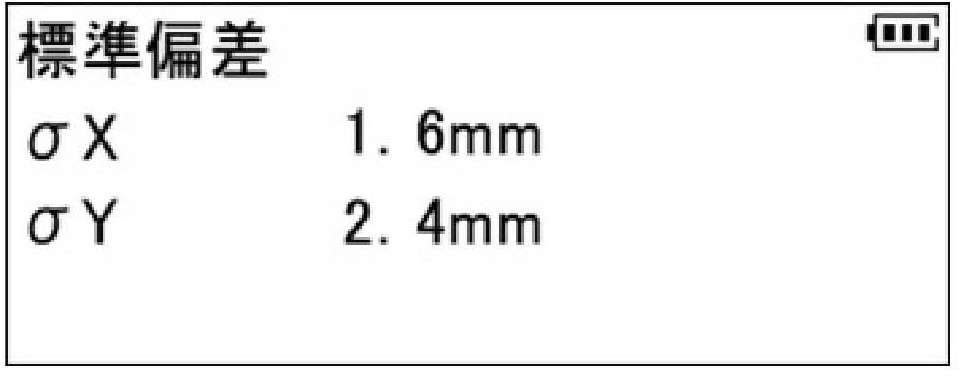
F2キー を押すと、測定精度を表す標準偏差が表示されます。
を押すと、測定精度を表す標準偏差が表示されます。
 キーを押して前の画面に戻ります。
キーを押して前の画面に戻ります。
⑤F5キー を押すと器械点の座標を更新し、最後に測定した既知点の方向角を計算して表示します。
を押すと器械点の座標を更新し、最後に測定した既知点の方向角を計算して表示します。
最後の既知点を視準し、F5キーを押して方向角を設定します。これで本製品のセットアップを終了します。
- F3キーを押すと、計算された方向角は設定されません。
 注意
注意
●器械点と3点以上の既知点が同一円周上に配置されている場合、器械点座標を計算できない場合があります。その場合、次のいずれかを試してください。
*器械点をなるべく既知点3点の中心の近くに配置します。
*同一円周上にないもう1つの既知点を測定します。
*既知点間の夾角が小さすぎる場合、器械点の座標が計算できない場合があります。
●器械点と既知点間の距離が長いほど夾角が狭いことを想定しにくく、同一円周上に配置されることがあるので注意が必要です。
- 杭打ち測定 »
製品取扱説明書の改善に役立てるため
ご協力をお願いいたします。
この記事は問題解決に役に立ちましたか?